Ibrahima S. Sow

Hi! I’m currently a Senior Autopilot Engineer at Tesla AI, where I develop new machine learning models for Full Self-Driving (FSD) and Robotaxi, spanning neural network development and training, model optimization, deployment, and AI systems integration to bring large-scale autonomy to production vehicles.
I love building systems that move fast, burn hard, and think smart. My interests lie at the intersection of aerospace, robotics, and autonomy. I’m particularly excited by autonomous systems, embodied intelligence, high-performance inference and compute, and spacecraft autonomy. My long-term ambition is to build technologies that push autonomy beyond Earth.
Previously, I completed my M.S. in Mechanical Engineering (Robotics & Controls) at Carnegie Mellon University, where I was a Belgian American Educational Foundation (BAEF) Fellow and a member of the Robotic Exploration Lab. Advised by Prof. Zac Manchester and Prof. Howie Choset, my research focused on real-time optimization for planning, guidance, navigation, and control of agile robotic systems and autonomous spacecraft.
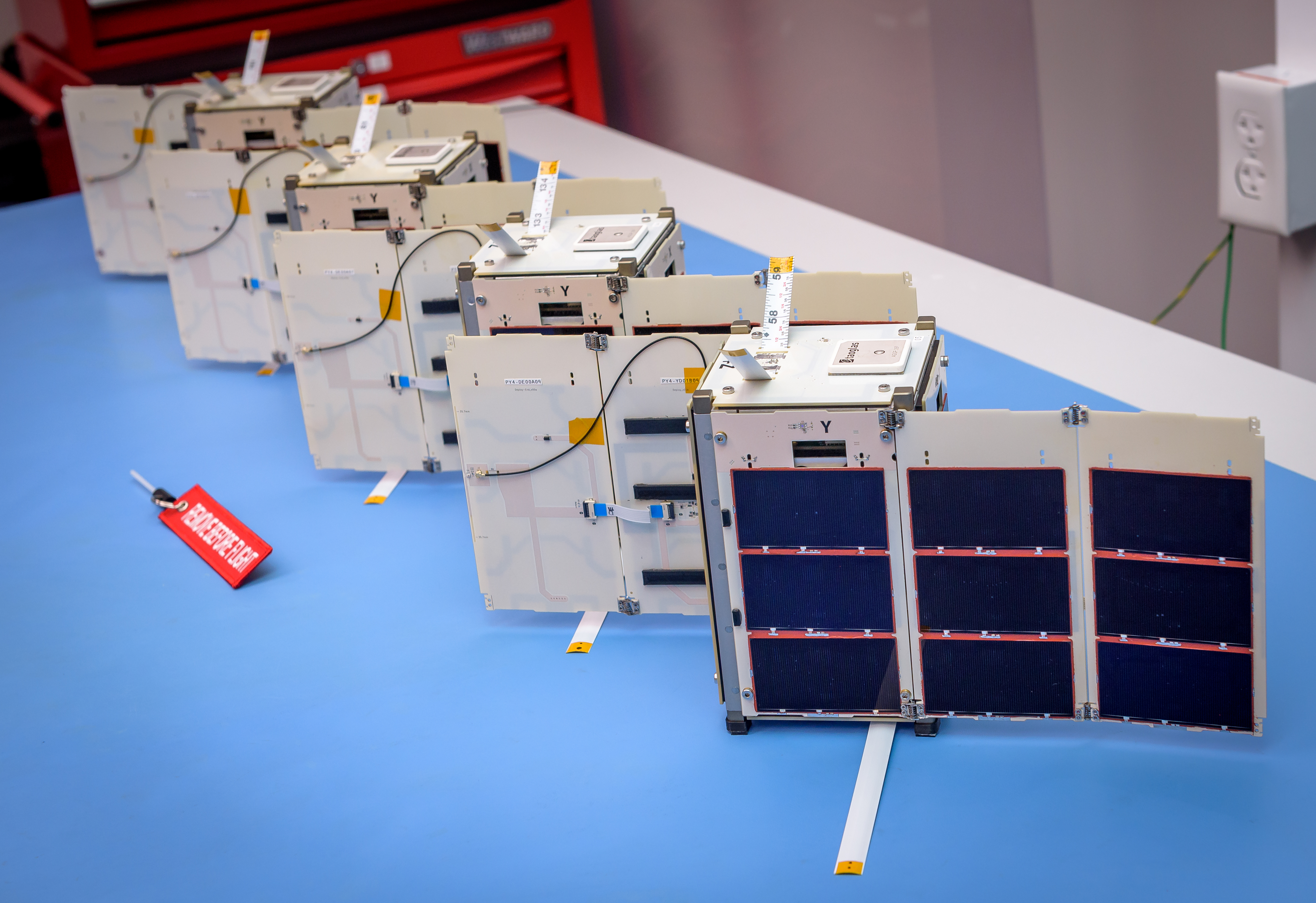
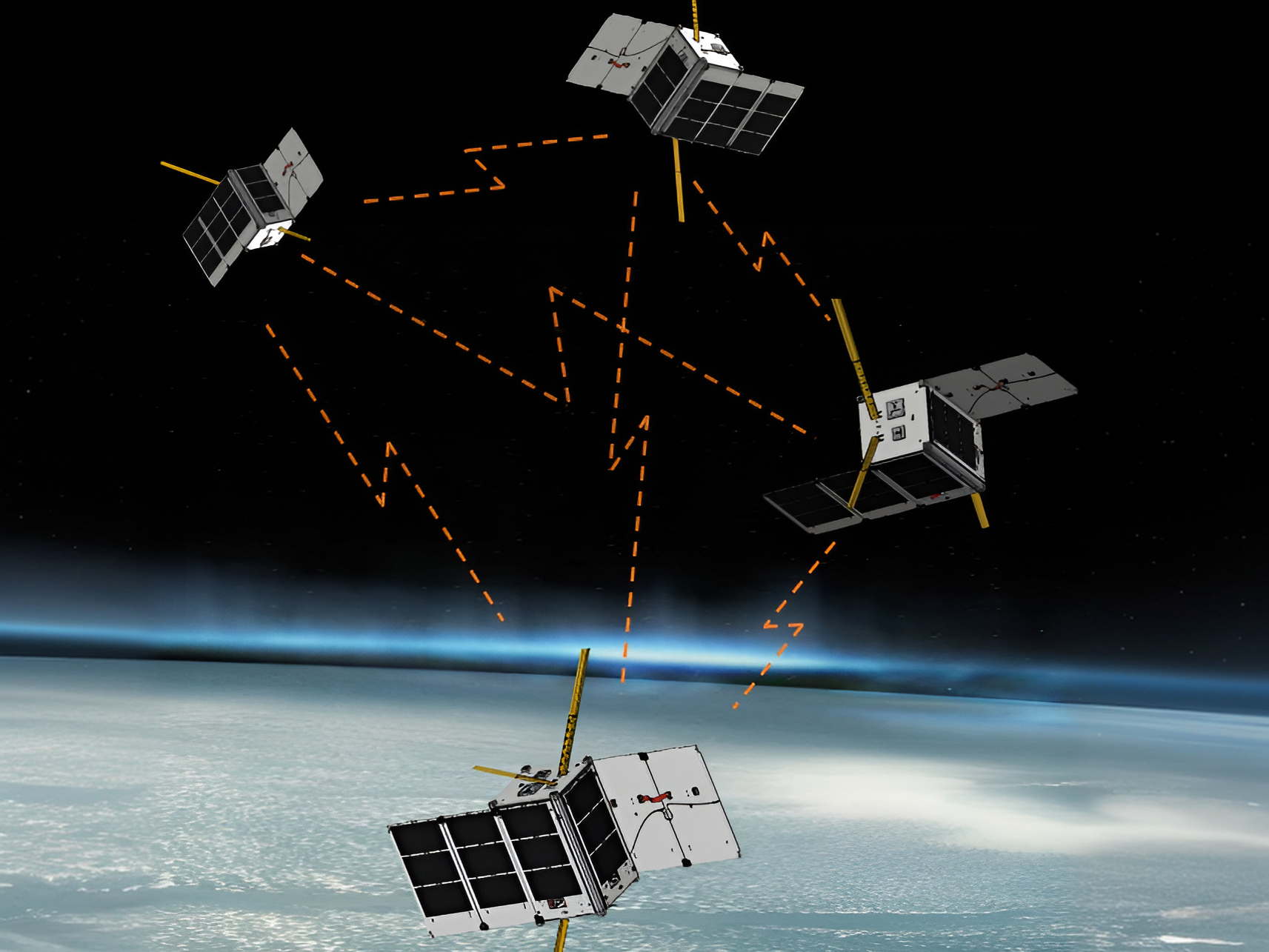
Beyond research, I led Argus, a small satellite mission demonstrating the use of onboard GPUs for vision-based navigation. I oversaw the development and testing of hardware and software across all subsystems, from spacecraft architecture to mission integration. I also contributed to the GNC stack of PY4, a satellite mission successfully launched into orbit aboard SpaceX Transporter-10 on March 4, 2024!
Before CMU, I received a B.S. in Electromechanical Engineering from Université libre de Bruxelles (Belgium). My undergraduate research explored novel sensors and actuators for minimally invasive surgical robotics, as well as reduced-order modeling techniques for spacecraft re-entry simulation.
I previously interned at Space Applications Services as an Avionics and Embedded Systems Engineer, developing ground support equipment for space payload testing, and at Redwire Space, where I contributed to technologies for on-orbit servicing and space infrastructure as a Mechanical Engineer. sele Feel free to reach out!
News
| May 21, 2026 | Promoted to Senior Autopilot Engineer at Tesla AI after one year 🗿 |
|---|---|
| Feb 18, 2025 | Joined the Tesla AI team to help make robotaxis a reality! |
| Nov 12, 2024 | Our On-Orbit Range-Only Navigation paper has been accepted to IEEE Aerospace 2025! |
| Jul 4, 2024 | We presented our PY4 satellite mission paper to the SmallSat conference |
| Jun 24, 2024 | I presented our Soft Capture paper at iSpaRo’24 in Luxembourg |