Ibrahima S. Sow

Hi! I’m currently an Autopilot Software Engineer at Tesla AI where my work spans machine learning, camera systems, and safe software for full autonomy at scale. Previously, I was a graduate student in Mechanical Engineering (Robotics & Controls) at Carnegie Mellon University (CMU), a Belgian American Educational Foundation Scholar, and a member of the Robotic Exploration Lab.
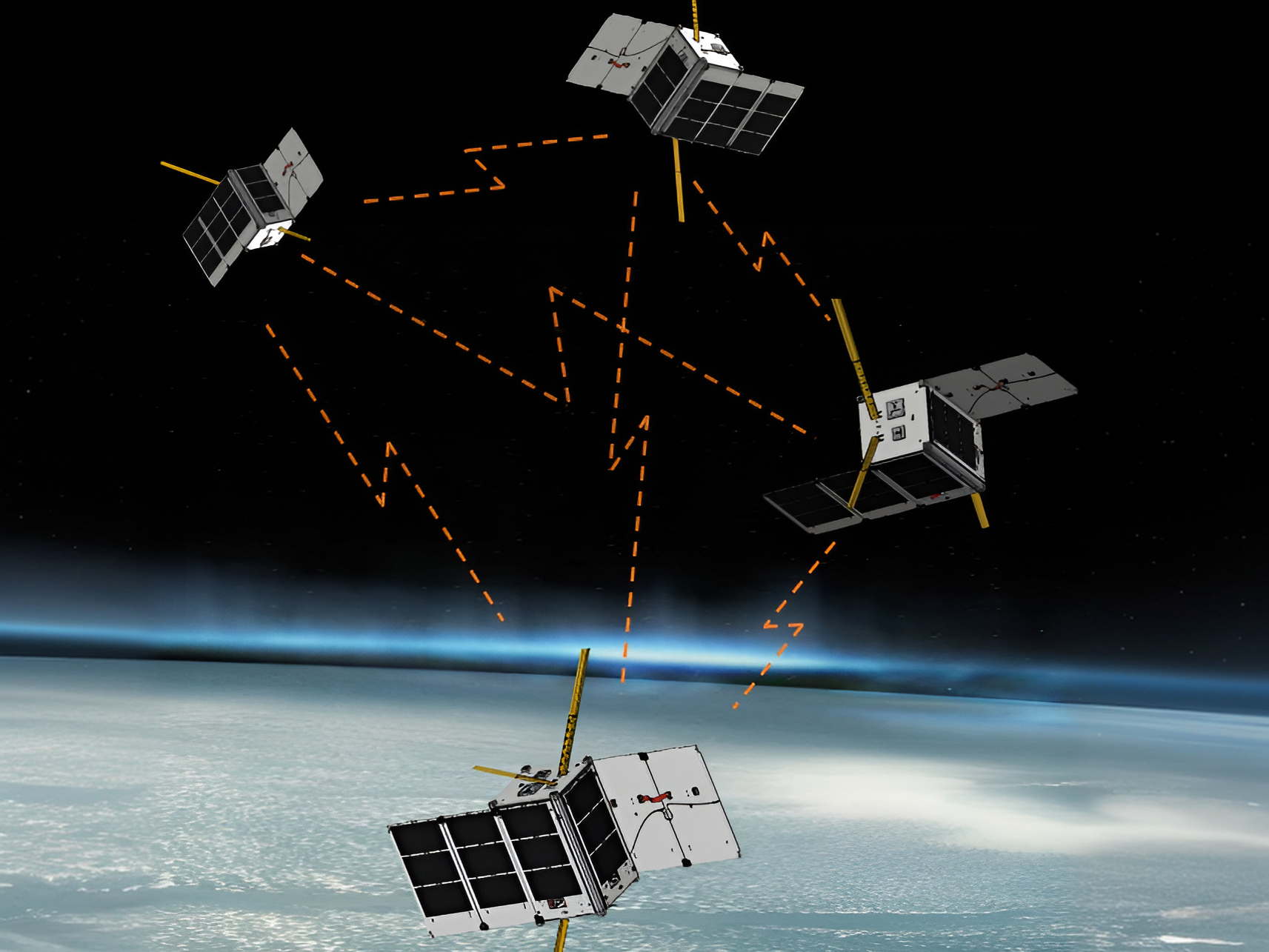
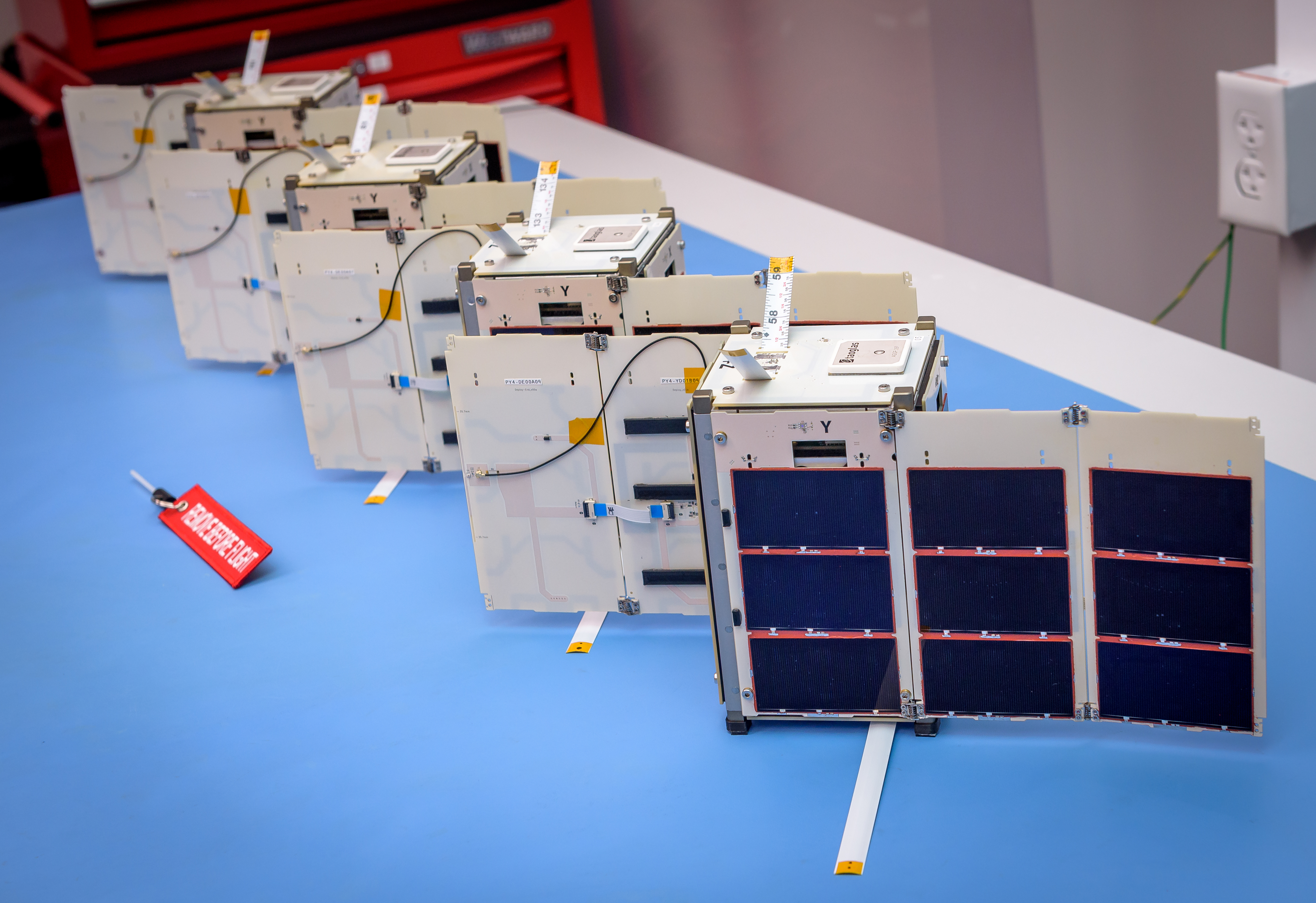
Advised by Pr. Zac Manchester and Pr. Howie Choset, my current research focuses on real-time optimization-based planning, control, and navigation for agile robots and autonomous spacecraft. I also actively work on the system design, guidance, navigation, and control (GNC), flight software, and communication subsystems for our satellite missions (Argus, PY4).
Previously, I graduated with a B.S. in Electromechanical Engineering from Université libre de Bruxelles (Belgium) in 2022. My undergraduate research was centered on the development, experimental testing, and control of new sensors and actuators for minimally invasive endoscopic and surgical tools, and on local model-order reduction optimization for spacecraft reentry simulation.
I have interned at Space Applications Services as an Avionics and Embedded Systems Engineer Intern, primarily working on Ground Support Equipment (GSE) for payload development and testing, and at Redwire Space, as a Mechanical Engineer Intern, contributing to on-orbit space servicing systems.
I love building systems that move fast, burn hard, and think smart. Lately, I’ve been focused on everything that makes metal come alive: real-time trajectory planning, control, and deep learning for high-performance autonomous systems, both on Earth and beyond. Feel free to reach out!
news
| Feb 18, 2025 | Joined the Tesla AI team to help make robotaxis a reality! |
|---|---|
| Nov 12, 2024 | Our On-Orbit Range-Only Navigation paper has been accepted to IEEE Aerospace 2025! |
| Jul 4, 2024 | We presented our PY4 satellite mission paper to the SmallSat conference |
| Jun 24, 2024 | I presented our Soft Capture paper at iSpaRo’24 in Luxembourg |
| Jun 10, 2024 | Awarded a Conference Student Sponsorship by the European Space Agency (ESA)! |